Institute of Information Theory and Automation
You are here
Department of Adaptive Systems
Deputy head:
Mail:

Phone:
266052061
286890420
Publications ÚTIA:
list ![]()
The Department of Adaptive Systems focuses predominantly on the design of decision-making systems, which modify their behavior according to the changing properties of their environment. This essential ability – adaptivity – enhances their efficiency. Decades of research have brought a number of conceptual, theoretical, algorithmic, software and application results. The applicability of adaptive systems is currently being extended toward complex scenarios by improving the classical adaptive systems and by developing their new versions.
The departmental “know-how” serves to resolve national as well as international research projects, running in collaboration with industry and government agencies. The interplay between theory and limited computing power is the common issue linking the various project domains. They include traffic control, management and control of technological systems, radiation protection, nuclear medicine, analysis of financial data, electronic democracy, etc. The increasing complexity of the problems addressed directs the main stream of the research toward decentralized control of large-scale systems and normative decision-making with multiple participants.
Honoring deceased members of the Department of Adaptive Systems
Department detail
Duration: 2009
- 2013
This long-term applied project covers various research and development activities according to specification of the industrial partner.
Duration: 2009
- 2012
The project aims to develop a novel on-line estimator of the key process variable in rolling mills by mixing multiple models with different sensitivities to inaccuracy in process data. The approach relies on the systematic treatment of uncertainty and merging of all available information.
Duration: 2008
- 2011
Dynamic decision making (DM) maps knowledge into DM strategy, which ensures reaching DM aims under given constraints. Under general conditions, Bayesian DM, minimizing expected loss over admissible strategies, has to be used.
Duration: 2008
- 2010
Stochastic decentralized control of distributed systems is studied from theoretical and algorithmic point of view. Decentralization is formalized by imposing conditional independence assumptions in the centralized control problem. However, local models and aims are in general incompatible with this structure and a suitable projections must be found.
Duration: 2007
- 2008
The proposed project deals with modeling and simulation of dynamic value networks, which are increasingly replacing the traditional vertically integrated enterprises.
- ‹ previous
- 5 of 13
- next ›
2023-06-08
Dne 6. června 2023 na veřejném zasedání vědecké rady Fakulty elektrotechnické ZČU přednesl náš kolega Václav Šmídl...

V soutěži o nejlepší publikaci ÚTIA zvítězily dva články autorů z oddělení Adaptivních systémů.1. místo v kategorii ...

Twenty three exceptionally outstanding young scientists were granted The Otto Wichterle Award, an honour given by the...

Ing. Lubomír Bakule, CSc. byl jmenován emeritním pracovníkem ÚTIA AV ČR, za jeho přínos k rozvoji ústavu a vědního...

Předseda Akademie věd ČR udělil na základě doporučení komise prémii Otto Wichterleho pro rok 2015 mladým nadějným...

Ondřej Tichý from Adaptive systems has been awarded the 1st place in the 7th annual Rektorys competition in applied...
2013-09-27
The article Decentralized control and communication by L. Bakule is recognized by ScienceDirect as one of the Top 25...
Czech Radiation Protection Society awarded prize for the best work of young authors in the field of protection against...

Ústav jaderného výzkumu Řež a.s. a Česká nukleární společnost ocenily disertační práci s názvem "Application of...
2011-09-29
The 2011 Outstanding Statistical Application Award of American Statistical Association has been presented to Miroslav...
2011-09-28
Miroslav Kárný and his co-authors A.Raftery (University of Washington) and P.Ettler (Compureg s.r.o.) were selected to...

Společnost Siemens a Fórum průmyslu a VŠ vyhlásili 13. ročník soutěže o nejlepší bakalářské, diplomové a doktorské...
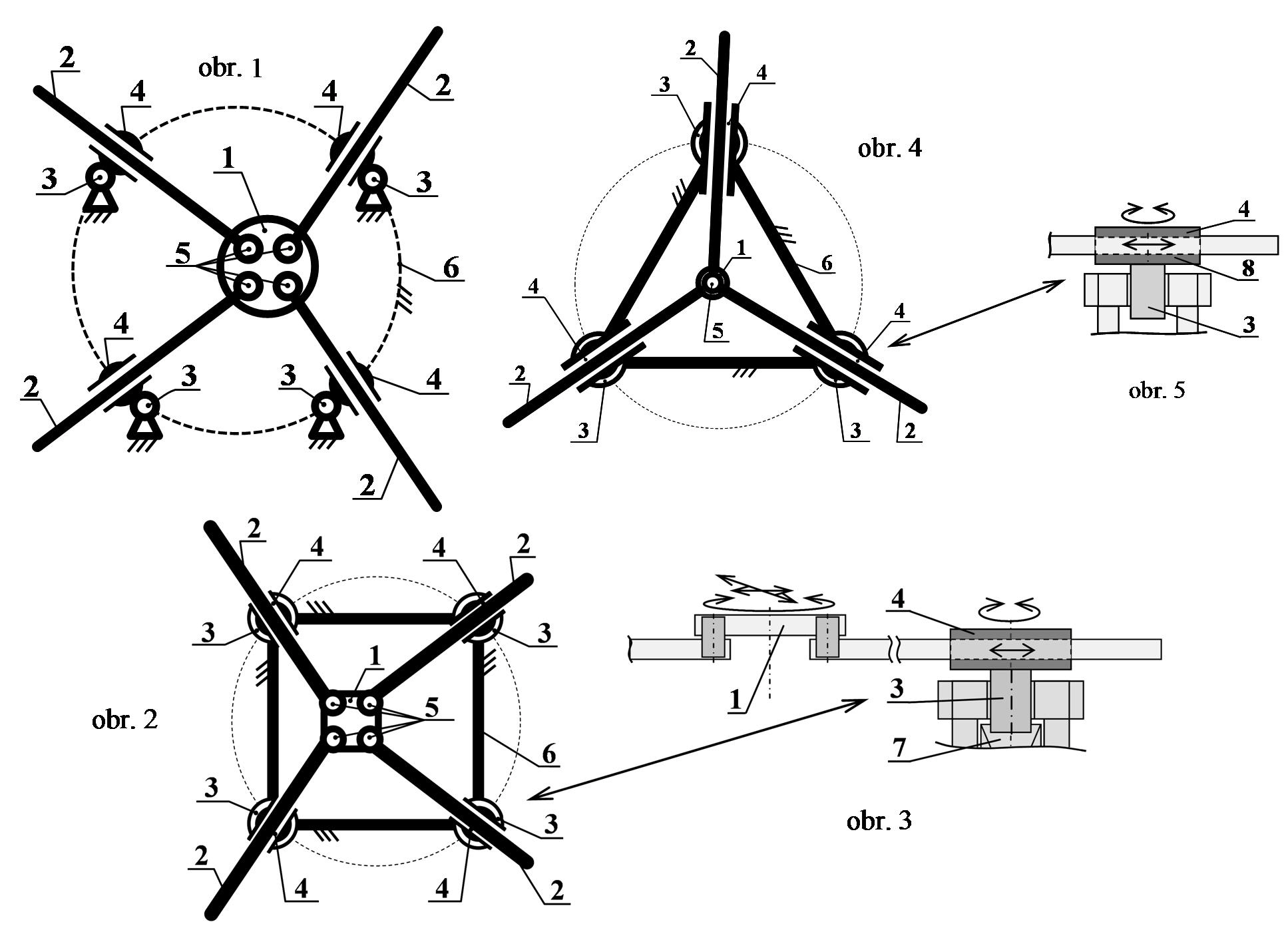
The fundament of the patent consists in a structural configuration of robotic device based on parallel kinematic...